|
Es wäre möglich, Elektromotoren direkt auf die Achsen zu setzen. Das hätte aber zur Folge, dass sich die Motoren nicht schneller als die Achsen drehen könnten. Wirtschaftlicher ist es aber, die Motoren schneller laufen zu lassen, da sie dann höhere Leistungen erbringen können. Dazu ist es nötig, die Motoren neben die Achsen zu setzen und ein Getriebe mit unterschiedlich großen Zahnrädern dazwischen zu schalten.
Nun sind bei den modernen Loks aber weder der Motor, noch das Zahnrad starr mit der Antriebsachse verbunden. Wäre dies der Fall, würden die Motoren jeden vom Oberbau herrührenden Stoß, den die Achsen erhalten, mitbekommen, was einen entsprechend hohen Verschleiß zur Folge hätte. Stattdessen sind Motor und Getriebe teils federnd auf der Achse gelagert, teils federnd mit dem Lokkasten verbunden.
Die Kraftübertragung vom Motor auf die Antriebsachse muss möglichst elastisch sein. Dies ist besonders beim Anfahren wichtig. Wird dem stehenden Motor Strom zugeführt, so ist anfangs das Drehmoment des Motors noch nicht groß genug, um die Lok und den Zug in Gang zu setzen. Dennoch muß sich der Motor etwas drehen können, da ein Stehenbleiben des Läufers Einbrennungen an den Lamellen hervorrufen würde.
Die Federung des Antriebs wird aber auch aus einem anderen Grund benötigt. Da Wechselstrommotoren, durch den Spannungsverlauf bedingt, ein pulsierendes Moment mit doppelter Frequenz, also 33 1/3 Hz, erzeugen, laufen sie immer etwas unruhig, was durch die Federung etwas aufgefangen wird.
Eine weitere Aufgabe der Federung liegt darin, die Zugkraftsprünge beim Übergang von einer Fahrstufe zur nächsten zu mildern.
Diese Federung kann auf verschiedene Weise erfolgen. Bei Loks der Baureihe
110/113 findet man den SSW Gummiringfederantrieb.
Daß die Serien-E 10 den SSW-Gummiringfederantrieb erhalten haben, darf wohl als mutigste Entscheidung der zuständigen Herren der DB angesehen werden. Im Gegensatz zu den anderen in den Vorserienloks eingebauten Antrieben, die sich schon in der Schweiz und in Frankreich mehrere Jahre lang bewährt hatten, war der SSW-Antrieb erst in einem Drehgestell der E 44 038 sowie in beiden Drehgestellen der E 10 003 verhältnismäßig kurze Zeit, im Einsatz, als die Entscheidung über seine weitere Verwendung gefällt werden
mußte. Man entschloß sich für ihn, da er in der E 44 038 im Vergleich zum Tatzlagerantriebs des zweiten Drehgestells deutlich besseres Verhalten zeigte und in der E 10 003 bei Anfahrversuchen (z.B. im April 1953 auf der Geislinger Steige und am 26. November 1953 auf der Westrampe der Arlberg-Strecke) im Vergleich zu den anderen E 10-Vorserienloks seine Überlegenheit bewies. Auch ließ er sich im Aw leichter ein- und ausbauen
sowiee instandsetzen. Allerdings konnte seine Langzeitbewährung nur mit Schwingungstests bei der Firma SSW abgeschätzt werden. Im Rückblick kann man feststellen, daß sich die mutige Entscheidung gelohnt hat, denn der Antrieb arbeitet im Geschwindigkeitsbereich bis 160 km/h immer noch zuverlässig, und der Gummiverschleiß ist geringer als vermutet worden war.
Dieser funktioniert im Prinzip so:
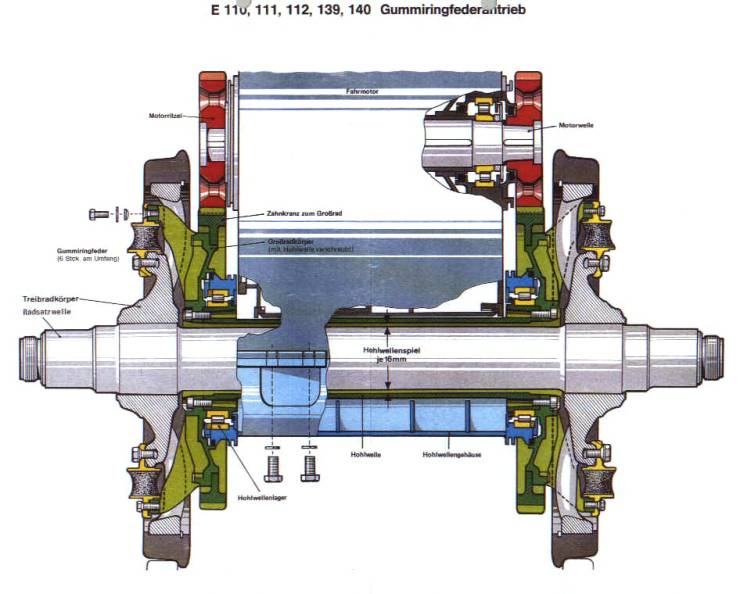
Die Kraftübertragung vom Fahrmotor zum Radsatz erfolgt über einen beidseitig angeordneten Gummiringfederantrieb. Er ermöglicht beim Anfahren eine Drehbewegung des Motors, während der Radsatz noch steht. Dadurch verteilt sich der hohe Anfahrstrom auf mehrere
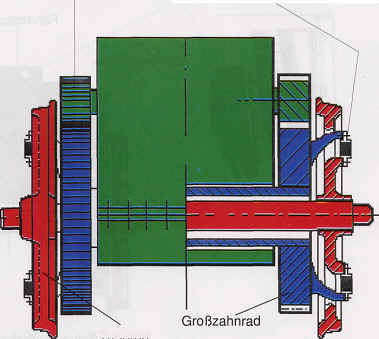
Kommutatorlamellen, wodurch eine zu starke Erwärmung der Lamellen vermieden wird.Die Antriebskraft wird vom Fahrmotorritzel auf das Großzahnrad übertragen (die auf der Motorwelle sitzenden kleinen Zahnräder, treiben zwei große Zahnräder
an), das mit dem Großradkörper und der Hohlwelle verbunden ist.
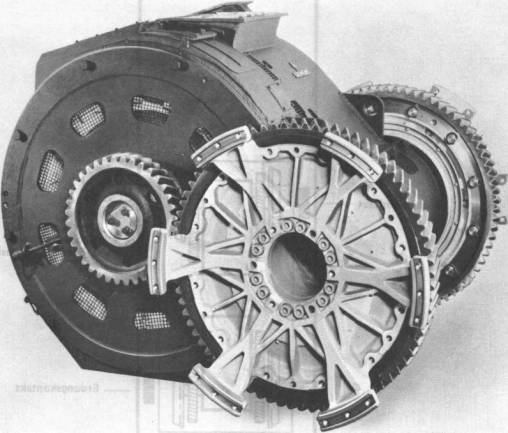
Die Hohlwelle umgibt die Radsatzwelle mit allseitigem Spiel. Je 6 Auslegearme
(Mitnehmer) am Großradkörper greifen zwischen den Speichen des Radsatzes hindurch. Die ringförmig angeordneten Gummisegmente sind mit einem am Radkörper angegossenen Ring verbunden.
Zwischen den Mitnehmern und den Speichen sitzen Gummisegmente, die die Federung übernehmen.
|
 Gummiringfederantrieb
Gummiringfederantrieb